- التسوق ، جعل بسهولة.
- /
- احصل على التطبيق!
تحتاج الكثير من مشاريع الروبوت إلى عصا التحكم. توفر هذه الوحدة حلاً ميسور التكلفة لذلك. ما عليك سوى الاتصال بمدخلين تناظريين، وسيكون الروبوت تحت أوامرك من خلال التحكم X وY. كما أن لديها مفتاحًا متصلاً بدبوس رقمي. يمكن توصيل وحدة عصا التحكم هذه بسهولة بـ Arduino بواسطة IO Expansion Shield العادي باستخدام الكابلات المرفقة.
وصف:
تنتج الشركة وحدة استشعار محور عصا التحكم في لعبة PS2 وتتكون من استخدام نظام مقياس الجهد لعصا التحكم PS2 المعدني عالي الجودة لـ (X، Y) مخرج تناظري ثنائي المحور وزر قناة إخراج رقمي (Z) 1.
عصا التحكم عبارة عن مزيج من مقياسين جهد تناظريين ومفتاح رقمي.
امتحان:
لوحدة تحكم اردوينو × 1
كابل بيانات USB × 1
وحدة استشعار لعبة PS2 × 1
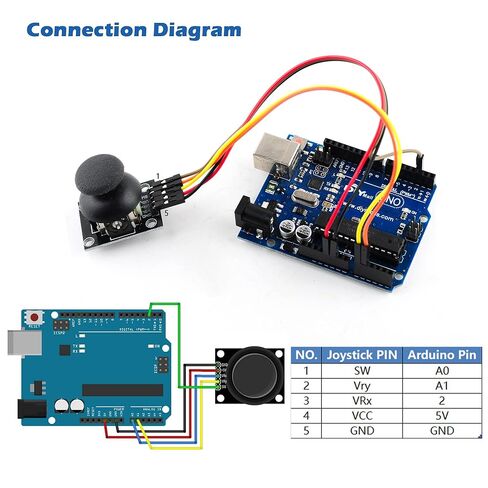
اتصال لوحدة اردوينو وعصا التحكم:
GND -> دبوس الوحدة -
+5 فولت --> دبوس الوحدة +5 فولت
التناظرية 0 --> الوحدة VRx
التناظرية 1 --> الوحدة النمطية VRy
رمز المثال:
// الوحدة KY023
// لمزيد من المعلومات
int JoyStick_X = A0; // س
int JoyStick_Y = A1; // ذ
int JoyStick_Z = 3; // مفتاح
الإعداد باطل ()
{
pinMode (JoyStick_X، INPUT)؛
وضع الدبوس (JoyStick_Y، INPUT)؛
pinMode (JoyStick_Z، INPUT)؛
المسلسل يبدأ (9600); // 9600 نقطة أساس
}
حلقة فارغة ()
{
كثافة العمليات س، ص، ض؛
x =analogRead(JoyStick_X);
y =analogRead(JoyStick_Y);
z = digitalRead (JoyStick_Z)؛
Serial.print (x، DEC)؛
Serial.print ("،")؛
Serial.print (y، DEC)؛
Serial.print ("،")؛
Serial.println (z، DEC)؛
تأخير (100)؛
}
الحزمة تشمل:
2 × عصا التحكم PS2 وحدة استشعار محور عصا التحكم في اللعبة
 Orzly® - حقيبة سفر للألعاب ووحدات التحكم لوحدات تحكم Sony PSP (GO/VITA/1000/2000/3000) تحتوي على مقصورات خاصة للألعاب والملحقات. تتضمن الحقيبة حزام كتف + مقبض حمل + حلقة حزام - أزرق
KWD 4.500
Orzly® - حقيبة سفر للألعاب ووحدات التحكم لوحدات تحكم Sony PSP (GO/VITA/1000/2000/3000) تحتوي على مقصورات خاصة للألعاب والملحقات. تتضمن الحقيبة حزام كتف + مقبض حمل + حلقة حزام - أزرق
KWD 4.500
 بطارية بديلة Batmax 2000 مللي أمبير WUP-010 لجهاز Nintendo Wii U Gamepad WUP-012، WUP-010
KWD 13.500
بطارية بديلة Batmax 2000 مللي أمبير WUP-010 لجهاز Nintendo Wii U Gamepad WUP-012، WUP-010
KWD 13.500
 زابور محول كاميرا PS4 لجهاز PSVR/PS5، كيبل محول الواقع الافتراضي متوافق مع وحدة تحكم بلاي ستيشن 5، ملحقات العاب الواقع الافتراضي USB3.0 (صغير)
KWD 8.500
زابور محول كاميرا PS4 لجهاز PSVR/PS5، كيبل محول الواقع الافتراضي متوافق مع وحدة تحكم بلاي ستيشن 5، ملحقات العاب الواقع الافتراضي USB3.0 (صغير)
KWD 8.500
 غطاء عدسة شاشة زجاجية بديلة لجهاز Gameboy Game Boy GB DMG Original System - رمادي فاتح
KWD 3.500
غطاء عدسة شاشة زجاجية بديلة لجهاز Gameboy Game Boy GB DMG Original System - رمادي فاتح
KWD 3.500