- Shopping, made easy.
- /
- Get the app!
VCCA connects to 3.3V power supply
VCCB connects to 5V power supply
GND connects to power negative pole respectively, the two power supply should be common-grounded with each other
When Ax has TTL 3.3V input, Bx will get TTL 5V output
When Bx has TTL 5V input, Ax will get TTL 3.3V output
NO direction control required
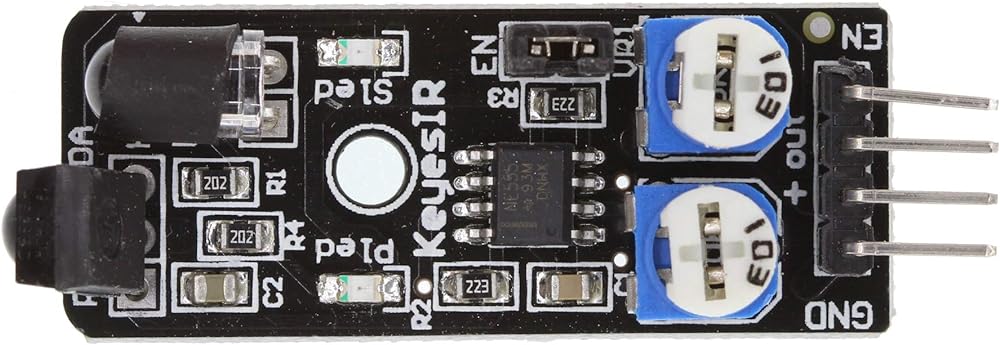
Here we use the obstacle avoidance module and digital 13 interface with LED to build a simple circuit, making the obstacle avoidance warning light, accessing the avoidance sensor to digital 3 interface, when the obstacle avoidance sensor senses the signal, LED light, otherwise off.
Program code:
int Led=13;//define LED interface
int buttonpin=3; //define obstacle avoidance interface
int val;//define Digital variable val
void setup()
{
pinMode(Led,OUTPUT);//define LED is output interface
pinMode(buttonpin,INPUT);//define obstacle avoidance is output interface
}
void loop()
{
val=digitalRead(buttonpin);//reading the value from 3 digital interface to val
if(val==HIGH)//when the obstacle avoidance sensor senses the signal, LED flash
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
 1PCS SCT013-005 5A 1V Non-invasive Split Core Current Transformer Sensor
KWD 5.500
1PCS SCT013-005 5A 1V Non-invasive Split Core Current Transformer Sensor
KWD 5.500
 uxcell 4mm Detecting Distance Inductive Proximity Switch PNP NO DC 6-36V 200mA 3-Wire LJ12A3-4-Z/BY for 3D Printer Probe Bed Leveling,MCU Board
KWD 4
uxcell 4mm Detecting Distance Inductive Proximity Switch PNP NO DC 6-36V 200mA 3-Wire LJ12A3-4-Z/BY for 3D Printer Probe Bed Leveling,MCU Board
KWD 4
 2 Pack GP2Y0A02YK0F Infrared Proximity Sensor Detect 20-150cm Distance Long Range
KWD 8
2 Pack GP2Y0A02YK0F Infrared Proximity Sensor Detect 20-150cm Distance Long Range
KWD 8
 WCC-1138L Auburn Liquid Level Sensor (Probe)
KWD 33.500
WCC-1138L Auburn Liquid Level Sensor (Probe)
KWD 33.500