【High performance】 The 10-axis AHRS IMU template contains 3-axis electronic gyroscope + 3-axis accelerometer + 3-axis magnetometer + barometer (angle + altitude), compared with 9-axis gyroscope, the added barometer can calculate the current altitude , which can be used for flight assistance.
【Support multiple communication methods】 Support USB/UART/I2C communication methods, more efficient compatible with Raspberry Pi, STM32, jetson series development boards, providing more DIY maker development possibilities.
【Built-in algorithm to accurately output key data】 Built-in Kalman algorithm, which can output Euler angles (Roll, Pitch, Yaw), quaternion, position, velocity, acceleration, angular velocity, magnetic field vector. It can provide up to 200Hz updated data in real time, so the research and development time for various needs is greatly reduced.
【What you will get】 In addition to the 10-axis IMU inertial navigation module, you also need an optional module shell (effectively helping the module to dissipate heat and reducing the interference of the external environment), and provide the host computer, operating instructions, development manual, development Code, source code for a lot of tutorials are free.
【Prompt technical help】Yahboom provides professional and timely technical help, if you encounter difficulties, please keep in touch with us.


 Light Curtain Sensor Switch Light Grating Security Device High Quality Safety Light Screen Sensor DC10-30V(12 Beams BEM1240-C-440NB)
KWD 51
Light Curtain Sensor Switch Light Grating Security Device High Quality Safety Light Screen Sensor DC10-30V(12 Beams BEM1240-C-440NB)
KWD 51
![Adafruit Fast Vibration Sensor Switch (Easy to Trigger) [ADA1766]](https://cdn1.tilga.com/md/prod/1/1542/3/39503190.24041.jpg) Adafruit Fast Vibration Sensor Switch (Easy to Trigger) [ADA1766]
KWD 2
Adafruit Fast Vibration Sensor Switch (Easy to Trigger) [ADA1766]
KWD 2
 MT8891A TO-92 Ratiometric Linear Hall Effect Sensors Chip Hall Element Hall Effect Sensor Linear Switch (10)
KWD 3
MT8891A TO-92 Ratiometric Linear Hall Effect Sensors Chip Hall Element Hall Effect Sensor Linear Switch (10)
KWD 3
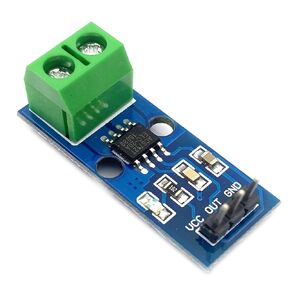 ACS712 AC and DC Current Sensor Module Detector ACS712ELC 5A 20A 30A Amps Amperage Range High Efficient 2pcs
KWD 2.500
ACS712 AC and DC Current Sensor Module Detector ACS712ELC 5A 20A 30A Amps Amperage Range High Efficient 2pcs
KWD 2.500










