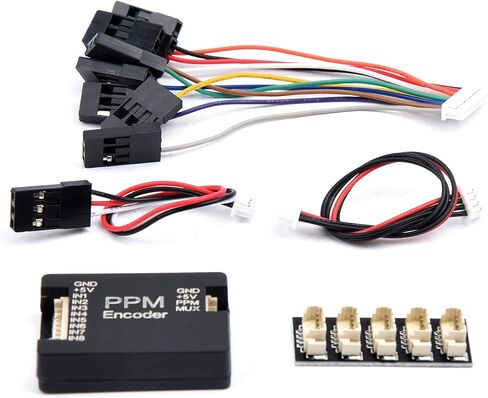
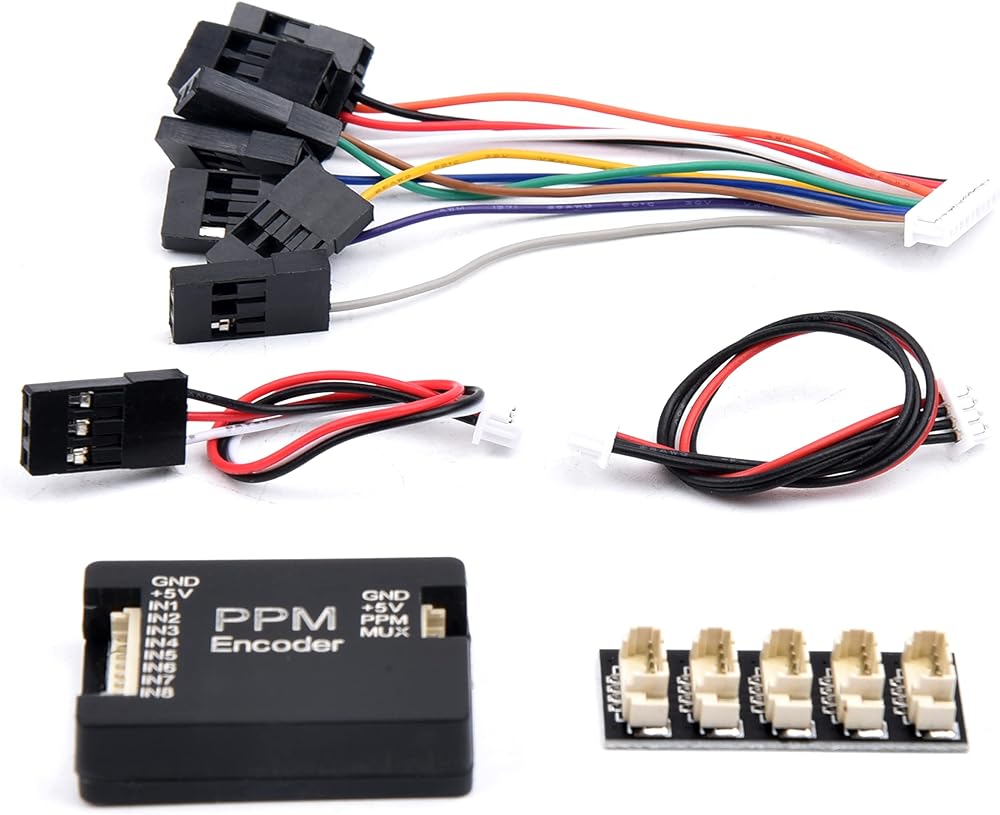
★The design of the PPM Encoder is based on the Paperazzi PPM Encoder.
★The whole project is based around the ATMEL ATMEGA328p AVR processor and all timing is done within interrupts so accuracy and stability is optimized.
★The PPM Encoder plugs into the PWM servo output ports of any R/C receiver and encodes them into a PPM pulse suitable for many autopilots (e.g. Pixhawk). Modifications to the R/C receiver are not necessary.
★Expands the i2c port to allow up to four additional peripherals to connect to pixhawk. Use the 4-wire cable to connect the i2c splitter and add a compass module, external led, digital airspeed sensor, or other peripherals to your vehicle.
★Important Note:The firmware comes pre-configured to read 8 Channels. In case you would like to change the settings of the PPM encoder to invert the PPM signal and change the fail safe pre-defined values you will need an AVR ISP programmer in order to reprogram it.

 Potensic ATOM SE GPS Drone with 4K ShakeVanish EIS Camera Less Than 0.55lbs/249g, Quadcopter with 4km/13123ft FPV Transmission, Auto Return, 62 Mins Flight Time Bundle with Extra Pair of Propellers
KWD 104
Potensic ATOM SE GPS Drone with 4K ShakeVanish EIS Camera Less Than 0.55lbs/249g, Quadcopter with 4km/13123ft FPV Transmission, Auto Return, 62 Mins Flight Time Bundle with Extra Pair of Propellers
KWD 104
 Black Accessory kit for E58 S168 JY019 Folding Quadcopter Remote Drone Propeller and Protective Cover and Landing Gear
KWD 6
Black Accessory kit for E58 S168 JY019 Folding Quadcopter Remote Drone Propeller and Protective Cover and Landing Gear
KWD 6
 220mm FPV Racing Drone Frame 5 inch Carbon Fiber Quadcopter Frame Kit Support DJI Air Unit
KWD 15.500
220mm FPV Racing Drone Frame 5 inch Carbon Fiber Quadcopter Frame Kit Support DJI Air Unit
KWD 15.500
 -22%
224mm HD 5 inch FPV Racing Drone Frame Carbon Fiber Quadcopter Frame kit for DJI FPV HD Unit
KWD 18
-22%
224mm HD 5 inch FPV Racing Drone Frame Carbon Fiber Quadcopter Frame kit for DJI FPV HD Unit
KWD 18