- Shopping, made easy.
- /
- Get the app!
Features
1. Allows controlling up to 253 ST / RSBL series serial bus servos at the same time
2. 9~25V wide voltage input (the input voltage and the servo voltage must be matched)
3. Based on the ESP32-WROOM-32 module, supports wired and wireless communication
4. Wired Control Mode---Supports sending JSON commands to ESP32 for controlling the serial bus servos, or directly sending control commands to the servos via USB Type-C port. Comes with Python demo
5. Wireless Control Mode---The Bus Servo Driver HAT (A) Will Automatically Establish A Hotspot after Powering on, Allows Users To Connect And Control The Driver board Via Mobile Phones, Tablets And PCs with the Cross-Platform Web Application we provided
6. Provides multiple control demos for different host controllers
7. Supports controlling the serial bus servos directly via onboard USB Type-C port
8. Suitable for Raspberry P 5 / 4B, powering the Pi via integrated 5V buck regulator circuit and communicating through GPIO UART interface, neat cable management
9. ESP32 Controller, Extensive Resources, Easy Secondary Development---Built-In WiFi And Bluetooth, As Well As ESP-NOW Support, For Remote Control And Servo Debugging
11. Ideal choice for building quadruped robots, hexapod walkers, robotic arms and other robotic projects requiring multiple servos
Comes with Online Tutorial and Online Development Resource, Please check: n9.cl/rtgv2
Specifications
Controller: ESP32-WROOM-32
Power supply Port: XT60 connector, 5.5×2.5 mm DC jack
Power Supply: 9~25V (the input voltage and the servo voltage must be matched)
Communication interface: UART, USB Type-C port × 2
Wireless communication: 2.4G WiFi
Mounting hole diameter: 3 mm
mounting hole spacing: 58×49 mm
PCB size: 65×57 mm
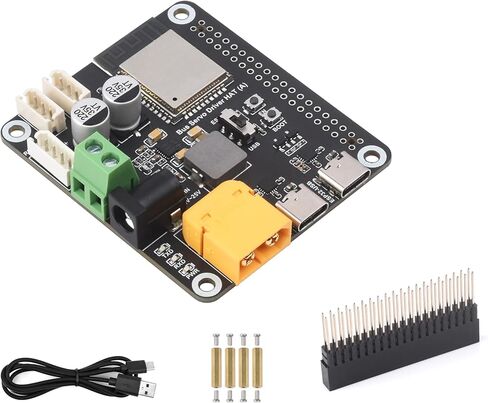
Package Content
Bus Servo Driver HAT (A) x1
2×20 pin header x1
USB-A to USB-C cable x1
Screws pack x1
 RP2040 MCU Board Onboard 1.28inch Round Touch LCD with CNC Metal Case, 240×240 Pixels 65K IPS LCD Display, Accelerometer and Gyroscope Sensor, Type-C Connector 6 × GPIO Pin via SH1.0 Connector
KWD 15
RP2040 MCU Board Onboard 1.28inch Round Touch LCD with CNC Metal Case, 240×240 Pixels 65K IPS LCD Display, Accelerometer and Gyroscope Sensor, Type-C Connector 6 × GPIO Pin via SH1.0 Connector
KWD 15
 Aluminium Alloy Case for Raspberry Pi 5, Pi5 Case with Dual Cooling Fans and 4PCS Heatsink Tape for Raspberry Pi 5 4GB/8GB (Raspberry Pi NOT Included)
KWD 6
Aluminium Alloy Case for Raspberry Pi 5, Pi5 Case with Dual Cooling Fans and 4PCS Heatsink Tape for Raspberry Pi 5 4GB/8GB (Raspberry Pi NOT Included)
KWD 6
 2-CH CAN HAT+ 2-Channel Isolated CAN Bus Expansion HAT for Raspberry Pi 5/4B/3B+/3B/2B/Zero 2W/Zero W/Zero WH,MCP2515 and SN65HVD230 Dual Chips HAT+ Standard Support Stacking with Other Modules
KWD 14
2-CH CAN HAT+ 2-Channel Isolated CAN Bus Expansion HAT for Raspberry Pi 5/4B/3B+/3B/2B/Zero 2W/Zero W/Zero WH,MCP2515 and SN65HVD230 Dual Chips HAT+ Standard Support Stacking with Other Modules
KWD 14
 ESP32-S3 RGB LCD Driver Board with 2.1inch TFT Round Display 480×480 Pixels, ESP32-S3-WROOM-1-N8R8 Module 32-bit 240MHz LX7 Dual-Core Processor, 8MB PSRAM and Flash, Support W-i-F-i & Blue Too-th
KWD 16
ESP32-S3 RGB LCD Driver Board with 2.1inch TFT Round Display 480×480 Pixels, ESP32-S3-WROOM-1-N8R8 Module 32-bit 240MHz LX7 Dual-Core Processor, 8MB PSRAM and Flash, Support W-i-F-i & Blue Too-th
KWD 16